If the wheels of a bike don’t act as gyroscopes to keep it upright, as was famously demonstrated by David E. H. Jones in his 1970 Physics Today article, does the gyroscopic effect of their spinning mass contribute in any way? In a word, yes. When the bike leans, the front wheel precesses, that is moves in the unexpected way spinning masses do in response to an applied torque, and this precession just happens to take the form of a rotation about the steering axis in the direction of the lean. Thus, the gyroscopic response of the spinning front wheel, in reaction to the bike leaning, is to steer the front wheel in the direction of the lean, which is exactly what is necessary for a bike to stay upright. The rear wheel is prevented from precessing by the rear frame, and so cannot contribute in the same way.
The details of how much and how fast the front wheel steers depend on the forward speed of the bike, the rate at which it is leaning, and the mass distribution of the front wheel. It turns out that the rate of precession is inversely proportional to the spin rate. The faster the front wheel spines, the slower it steers in the direction of a lean. This means that the rate at which the front wheel steers due to gyroscopic effect alone is not always exactly the right rate to keep the bike upright. This can mean that at some forward speeds the bike is self-stable, but not at others, as is the case with most real bikes. At the same time, gyroscopic effect is seldom the only thing generating torque about the steer axis, and it might be just right when combined with the other effects.
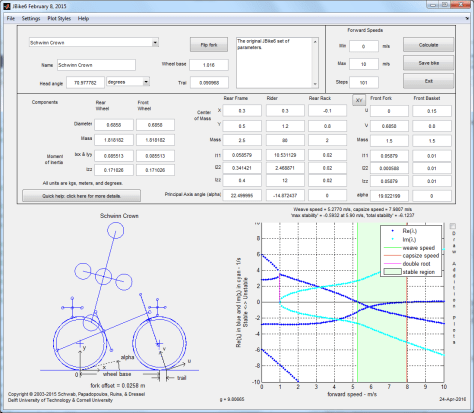
Calculating exactly what contribution the gyroscopic effect makes is complicated, but there is a tool available online, called JBike6, that can help. For any particular bike, it can predict at what forward speeds that bike will exhibit self-stability. Below is a screen capture of the JBike6 user interface showing the 46 parameters it accepts to define a bike, the idealized sketch it makes of that bike, and the eigenvalues it calculates to predict self-stability.
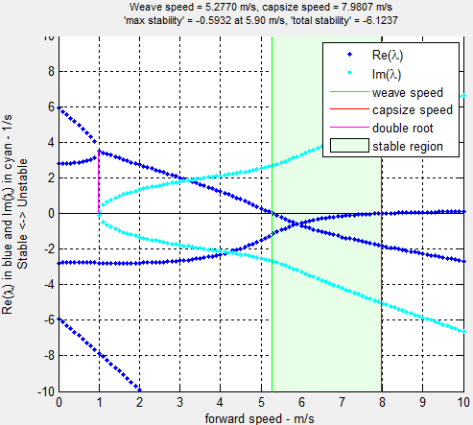
Below is a close-up of the eigenvalue plot. As the JBike6 documentation explains, when the real parts, in dark blue, of all the eigenvalues are negative, then the equations predict that the bike will be self stable. Thus, this particular bike should be self-stable between 5.277 and 7.981 m/s (11.8 – 17.85 mph).
Finally, to see what role the gyroscopic effect of the front wheel is playing in this self-stability, we can simply set the mass moment of inertia, the mathematical description of how the mass is distributed, of the front wheel to zero. This completely negates the gyroscopic effect without altering any other parameter. The plot is below.

That single change alters the plot so that the eigenvalues are never all negative, for forward speeds between 0 and 10 m/s. That doesn’t mean that the bike is never self-stable, just that it is no longer self-stable at the leisurely speeds it was with the help of the gyroscopic effect of the front wheel. In fact, JBike hints at possible self-stability starting at 14.796 m/s, and we can check that simply by increasing the stop speed to consider. The plot is below.
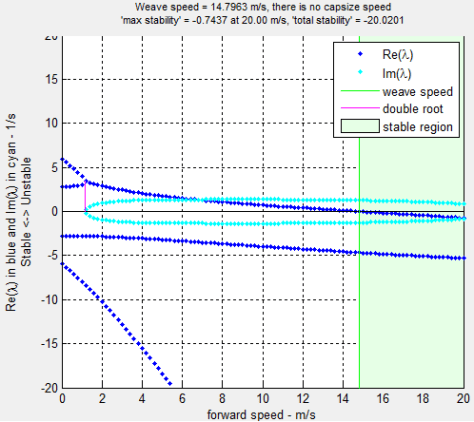
Sure enough, JBike6 does find a range of speeds at which it predicts this bike to be self-stable, even without the gyroscopic effect of the front wheel. It just starts at almost 15 m/s, a little over 33 mph.
Is that it then? The gyroscopic effect is not necessary for self-stability, but it does decrease the forward speed at which it occurs? Not so fast. JBike6 allows modification to all 46 parameters, and a little playing around with the steering axis angle (steepening it), the trail (lengthening it), and the mass distribution of the front assembly brings the onset speed for self stability back down under 6 m/s (13.4 mph).
So, there you have it. Yes, the gyroscopic effect of the front wheel can contribute to the self-stability of a bike, by helping to steer the front wheel in the direction of a lean, but it is not necessary. Other factors can pick up the slack, if the bike is arranged properly.
